
ضد رطوبت برای گشتاور مطلوب، حرکت صاف، حرارت کم موتور و سر و صدا
خودکار شناسایی موتور و پارامتر خودکار پیکربندی برای گشتاور مطلوب از موتورهای وسیع
گام و جهت (PUL / DIR) و CW / CCW (از طریق تنظیم بلومر داخلی) کنترل. گام و جهت به طور پیش فرض Multi-Stepping برای حرکت صاف موتور
جداسازی Opto برای سیگنال های کنترل ورودی
ولتاژ ورودی ۱۸-۸۰VAC یا ۲۴-۱۱۰VDC
۱۶ انتخاب قطعنامه های میکرو گام از ۴۰۰-۵۱،۲۰۰ از طریق سوئیچ DIP
۸ تنظیمات خروجی انتخابی از ۲٫۴ – ۷٫۲A از طریق سوئیچ DIP
نرم افزار شروع بدون “پرش” در هنگام روشن است
فرکانس ورودی پالس تا ۲۰۰ کیلوهرتز. TTL سازگار و ورودی های جدا شده اپتیکال
کاهش جریان خودکار بطور خودکار
حفاظت از ولتاژ و جریان بیش از حد
Electrical Specifications (Tj = ۲۵oC/77oF)
|
Parameters |
DMA860E |
|||
|
Min |
Typical |
Max |
Unit |
|
|
Output current |
۲٫۴ |
– |
۷٫۲ |
A |
|
Supply voltage |
۱۸ ۲۴ |
۳۶ – ۷۰ ۵۰ – ۹۰ |
۸۰ ۱۱۰ |
VAC VDC |
|
Logic signal current |
۷ |
۱۰ |
۱۶ |
mA |
|
Pulse input frequency |
۰ |
– |
۲۰۰ |
kHz |
|
Minimal Pulse Width |
۲٫۵ |
– |
– |
μS |
|
Minimal Direction Setup |
۵٫۰ |
– |
– |
μS |
|
Isolation resistance |
۵۰۰ |
– |
|
Mohm |
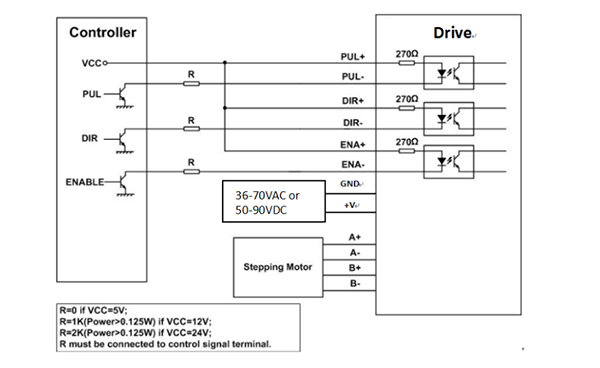
اتصالات پیکربندی P1
|
Pin Function |
جزئیات |
|
PUL |
سیگنال پالس: پالس فعال در لبه رو به افزایش است. PUL-HIGH، ۴-۵V هنگامی که PUL-LOW 0-0.5V است. عرض پالس حداقل ۲٫۵μs. یک مقاومت را برای محدود کردن جریان در ولتاژ منطق ورودی + ۱۲ ولت + ۲۴V (1K برای ۱۲ ولت، ۲K برای ۲۴ ولت) اضافه کنید. همانند DIR و ENA سیگنال |
|
DIR |
سیگنال DIR: این سیگنال دارای ولتاژ پایین / ولتاژ بالا برای نشان دادن دو جهت چرخش موتور است. ۴-۵V هنگامی که DIR-HIGH، ۰-۰٫۵V زمانی که DIR-LOW. حداقل زمان راه اندازی ۵μs. تعویض اتصال دو سیم از یک سیم پیچ (به عنوان مثال A + و A-) به درایو، مسیر موتور را معکوس می کند. |
|
ENA |
سیگنال را فعال کنید: این سیگنال برای فعال / غیر فعال کردن درایو مورد استفاده قرار می گیرد. سطح بالا + ۵V (سیگنال کنترل NPN) برای فعال کردن درایو و سطح پایین برای غیر فعال کردن درایو. سیگنال های کنترل PNP و دیفرانسیل برعکس، یعنی سطح پایین برای فعال کردن. به طور پیش فرض این است که UNCONNECTED (فعال شده) .. |
اتصالات پیکربندی P2
|
Pin Function |
جزئیات |
|
A+, A- |
فاز موتور اتصالات اتصال موتور A + سیم به پین A +؛ موتور A- سیم A |
|
B+, B- |
اتصالات فاز B موتور. اتصال موتور B + سیم به B + پین؛ موتور B- سیم B |
|
AC |
ورودی منبع تغذیه ۱۸ ~ ۸۰VAC یا ۲۴-۱۱۰ VDC؛ بدون قطبش |
|
AC |
این درایو با استفاده از یک سوئیچ DIP 8 بیتی برای تنظیم وضوح میکرواستپ، و جریان فعلی موتور، همانطور که در زیر نشان داده شده است:

Microstep Resolution Selection
رزولوشن Microstep توسط SW5، ۶، ۷، ۸ از سوئیچ DIP تنظیم شده است که در جدول زیر نشان داده شده است:
|
Microstep
|
Steps/rev.(for 1.8o motor) |
SW5 |
SW6 |
SW5 |
SW6 |
|
۲ |
۴۰۰ |
ON |
ON |
ON |
ON |
|
۴ |
۸۰۰ |
OFF |
ON |
ON |
ON |
|
۸ |
۱۶۰۰ |
ON |
OFF |
ON |
ON |
|
۱۶ |
۳۲۰۰ |
OFF |
OFF |
ON |
ON |
|
۳۲ |
۶۴۰۰ |
ON |
ON |
OFF |
ON |
|
۶۴ |
۱۲۸۰۰ |
OFF |
ON |
OFF |
ON |
|
۱۲۸ |
۲۵۶۰۰ |
ON |
OFF |
OFF |
ON |
|
۲۵۶ |
۵۱۲۰۰ |
OFF |
OFF |
OFF |
OFF |
|
۵ |
۱۰۰۰ |
ON |
ON |
ON |
OFF |
|
۱۰ |
۲۰۰۰ |
OFF |
ON |
ON |
OFF |
|
۲۰ |
۴۰۰۰ |
ON |
OFF |
ON |
OFF |
|
۲۵ |
۵۰۰۰ |
OFF |
OFF |
ON |
OFF |
|
۴۰ |
۸۰۰۰ |
ON |
ON |
OFF |
OFF |
|
۵۰ |
۱۰۰۰۰ |
OFF |
ON |
OFF |
OFF |
|
۱۰۰ |
۲۰۰۰۰ |
ON |
OFF |
OFF |
OFF |
|
۲۰۰ |
۴۰۰۰۰ |
OFF |
OFF |
OFF |
OFF |
تنظیمات رایج
برای یک موتور معین، جریان درایو بالاتر باعث می شود موتور به گشتاور بیشتری تولید کند، اما در عین حال باعث افزایش گرما در موتور و درایو می شود. بنابراین، جریان خروجی به طور کلی تنظیم می شود به طوری که موتور برای عملیات طولانی مدت بیش از حد گرم نمی شود. از آنجایی که اتصالات موازی و سریال کویل های موتور به طور قابل توجهی باعث تغییر القایی و مقاومت می شود، بنابراین تعیین جریان خروجی درایو بسته به جریان فاز موتور، خروجی موتور و روش های اتصال مهم است. امتیاز فعلی فاز ارائه شده توسط تولید کننده موتور در انتخاب جریان درایو مهم است، اما انتخاب نیز به خطوط و اتصالات بستگی دارد. سه بیت اول (SW1، ۲، ۳) سوئیچ DIP برای تنظیم جریان پویا استفاده می شود. یک تنظیم نزدیک به جریان مورد نیاز موتور خود را انتخاب کنید.
|
Peak Current |
RMS Current |
SW1 |
SW2 |
SW3 |
|
۲٫۴۰A |
۱٫۷۰A |
ON |
ON |
ON |
|
۳٫۰۸A |
۲٫۱۸A |
OFF |
ON |
ON |
|
۳٫۷۷A |
۲٫۶۷A |
ON |
OFF |
ON |
|
۴٫۴۵A |
۳٫۱۵A |
OFF |
OFF |
ON |
|
۵٫۱۴A |
۳٫۶۴A |
ON |
ON |
OFF |
|
۵٫۸۳A |
۴٫۱۲A |
OFF |
ON |
OFF |
|
۶٫۵۲A |
۴٫۶۱A |
ON |
OFF |
OFF |
|
۷٫۲۰A |
۵٫۰۹A |
OFF |
OFF |
OFF |
نکات: با توجه به تحرک موتور، جریان واقعی در سیم پیچ ممکن است کوچکتر از تنظیم فعلی پویا باشد، به ویژه در شرایط با سرعت بالا.
درایور پیمای DMA860E به منظور تقویت موتورهای قیمتی هیبریدی NEMA 23، ۲۴، ۳۴، و ۴۲ قدرت ۲ فاز (۱٫۸ درجه) یا ۴ فاز (۰٫۹ درجه) طراحی شده است. این می تواند به راحتی در بسیاری از صنایع (CNC، پزشکی، اتوماسیون، بسته بندی …)، مانند جداول X-Y، ماشین های حکاکی، ماشین های برچسب زنی، میلز، پلاسما، برش لیزری، دستگاه های انتخاب و مکان و غیره مورد استفاده قرار گیرد. عملکرد عالی آن، طراحی ساده و راه اندازی آسان آن را برای بسیاری از برنامه های نوع گام و جهت جهت ایده آل می کند.
دانلود کاتالوگ